2016年南京航空航天大学820自动控制原理考研真题
时间:2017-11-17 12:41 来源:研导师
资料内容:
2016年南京航空航天大学820自动控制原理考研真题
真题原文:
南京航空航天大学
2016 年硕士研究生招生考试初试试题( A 卷 )
科目代码: 820
科目名称: 自动控制原理 满分: 150 分
注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无
效;③本试题纸须随答题纸一起装入试题袋中交回!
本试卷共 10 大题,满分 150 分
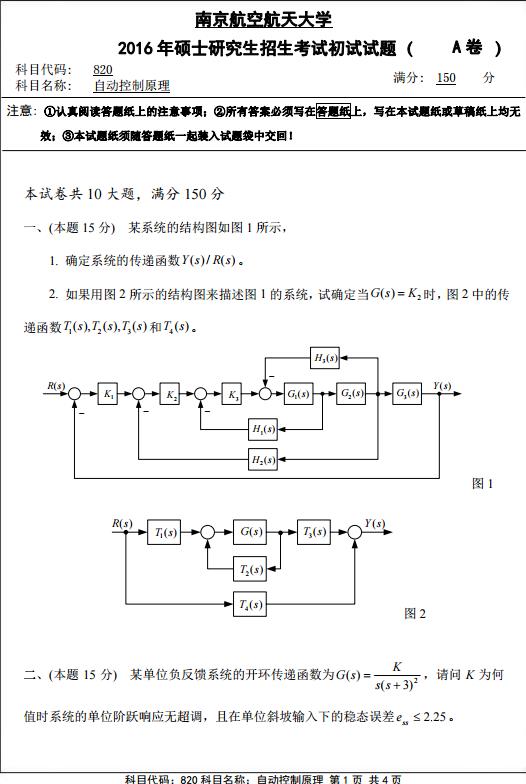
一、(本题 15 分) 某系统的结构图如图 1 所示,
1. 确定系统的传递函数Y(s)/ R(s) 。
2. 如果用图 2 所示的结构图来描述图 1 的系统,试确定当 2 Gs K ( ) = 时,图 2 中的传递函数 123 TsT sTs ( ), ( ), ( ) 和 4 T s( )。
二、(本题 15 分) 某单位负反馈系统的开环传递函数为 2 ( 3) ( )+ = s sK G s ,请问 K 为何
值时系统的单位阶跃响应无超调,且在单位斜坡输入下的稳态误差ess ≤ 2.25。
三、(本题 15 分) 如图 3 所示的系统,其中G(s)是某典型环节,其幅相曲线是个半圆,
如图 4 所示;已知系统单位阶跃响应的调节时间t s s = 7 ,
1. 确定G(s);
2. 求系统单位阶跃响应的峰值时间 p t 和超调量σ % ;
3. 概略绘出单位阶跃响应曲线。
四、(本题 15 分) 已知单位负反馈系统的开环传递函数为 ( 3)
1. 绘制系统闭环根轨迹 ( K:0 → ∞ );
2. 确定闭环有重极点时的闭环传递函数(零极点表达式);
3. 输入为单位斜坡信号时,欲使 ≤ 1 ss e ,求 K 的取值范围。
五、(本题 15 分) 已知某最小相位系统的结构图如图 5 所示,其中反馈α 为比例环节,
前向通路G(s)的对数幅频特性渐近线如图 6 所示。试求:
1. 求G(s)的表达式;
. 2. 画出开环幅相曲线,并结合该曲线分析使闭环系统稳定的α 取值范围;
3. 若α = 0.2时,求系统的相角裕度γ 。
六、(本题 15 分) 已知某串联校正单位反馈控制系统,图 7 给出了该系统校正前后的开
环传递函数的渐近对数幅频曲线(Bode 图),图中实线为原系统 ( ) 0 G s 的 Bode 图,虚
线为校正后系统 ( ) ' G s 的 Bode 图,
1. 确定校正前后系统开环传递函数 ( ) 0 G s 和 ( ) ' G s 的表达式;
2. 计算校正前后系统的相角裕度 0 γ 和 ' γ ;
3. 确定校正装置的传递函数G (s) c ;
4. 讨论采用该校正装置的优缺点。
七、(本题 15 分) 某线性定常离散系统如图 8 所示,已知采样周期T s = 0.2 ,参考输入
为r(t) = 2 + t ,图中 ( ) 1 Ts
要使系统的稳态误差小于 0.25,试确
定 K 的取值范围。(附 Z 变换表: aT
八、(本题 15 分) 某非线性系统如图 9 所示,非线性元件的描述函数 4 ( ) M NA K
其中 M = 1, K = 0.5 。试用描述函数法分析系统周期运动的稳定性,并求出稳定周期
运动的振幅 A 和频率ω 以及输出c t( )的表达式。
九、(本题 15 分) 某开环系统的状态空间表达式为
1. 判断该开环系统的可控性、可观性和稳定性;
2. 计算该开环系统的传递函数;
3. 证明使用状态反馈控制律u(t) = −K ⋅ x(t)无法镇定该系统。
十、(本题 15 分) 某开环系统的状态空间表达式如下:
1. 若该开环系统的状态不可测,试设计一个全维状态观测器,要求该观测器系统的
阻尼系数为 0.707,且其调节时间比原开环系统的快 10 倍;
2. 在 1 基础上,设计一个状态反馈控制器 ,要求整个闭环系统的调节时间是原
开环系统的一半,且具有临界阻尼响应的形式。
资料截图:
下载地址:
 |
2016年南京航空航天大学820自动控制原理考研真题 |
以上是文加考研(考研一对一辅导品牌)为大家提供的2016年南京航空航天大学820自动控制原理考研真题,希望对大家有所帮助。考研的过程中,希望大家努力加油,大家备考过程中有任何疑问,可以直接咨询。